图形学学习笔记#3:光线追踪
在介绍光追之前,我先介绍一下图形学的两种绘制方式:
第一种是对于每个对象,确定其所覆盖像素,并用对象的状态确定像素的明暗值。显然这种方法无法用来实现光追。
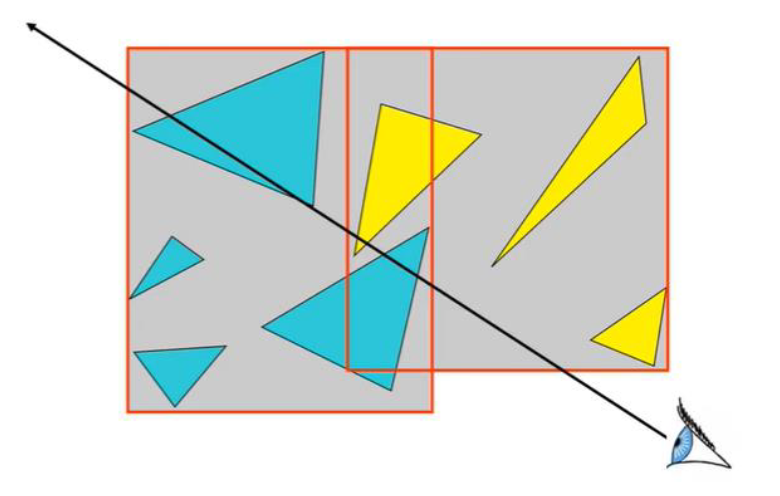
所以我们要用的是第二种方法:对于每个像素,确定投影到这个像素的距离观察者最近的对象,基于该对象来计算像素明暗值。
原理
Forward Tracing
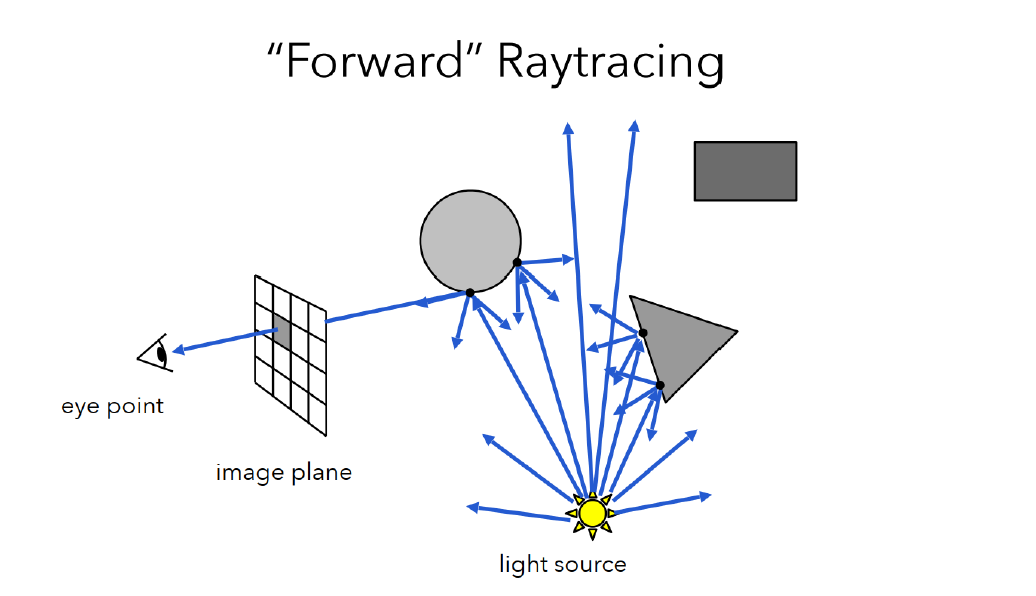
当一束光照射在物体上,其反射的光子只有少数能到达我们眼睛。如果我们将光源发射的光线逐一进行模拟,进行成千上万次反射折射,直到计算出每一个像素点的每一道光,就可模拟出光线追踪的效果。这种方法被称为Forward Tracing,很显然,在复杂的环境中基本无法被实现,于是我们有了反向的Backward Tracing。
Backward Tracing
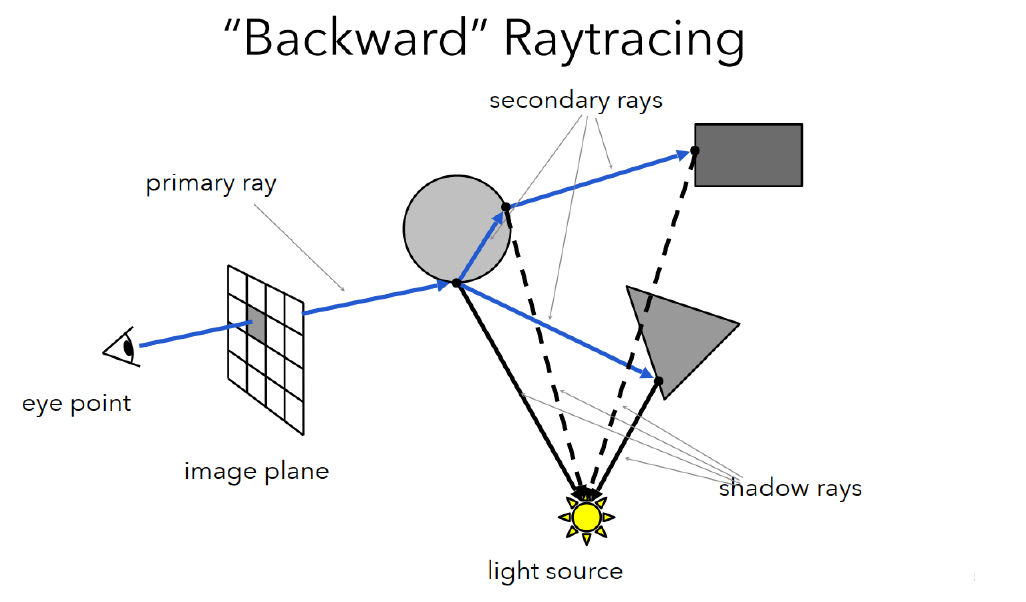
既然Forward Tracing很难被实现,我们可以从另一个角度来看这个问题:将光线视为从眼睛发出,当照射到物体上时进行反射折射,最终若回到某个光源,则说明能获得照明,若被遮挡则说明处于阴影之中。
算法
光线与场景求交
光线方程 ,e为视点,d为光线向量。
球面方程 ,c为圆心。
三角形方程 ,abc为三角形顶点。
光线与面方程联立即可求交点。
Whitted着色模型
这个着色模型的前三项我们应该十分熟悉了,对应的是之前介绍过的环境光、漫反射以及镜面反射项。那么后面两项呢?
由于在光线追踪模型中,光线会在场景中进行多次的反射与折射,所以最后两项就是反射(reflected)与折射(transmitted)的 递归项 。
Shadow Ray
在光线追踪模型中,阴影的计算需要依托于反射光线与场景的碰撞。当前光线照到物体表面,进行反射,反射出的shadow ray若不会碰撞到场景中的任何物体,则说明最终能被看到,否则说明其为阴影。

细节
空间加速
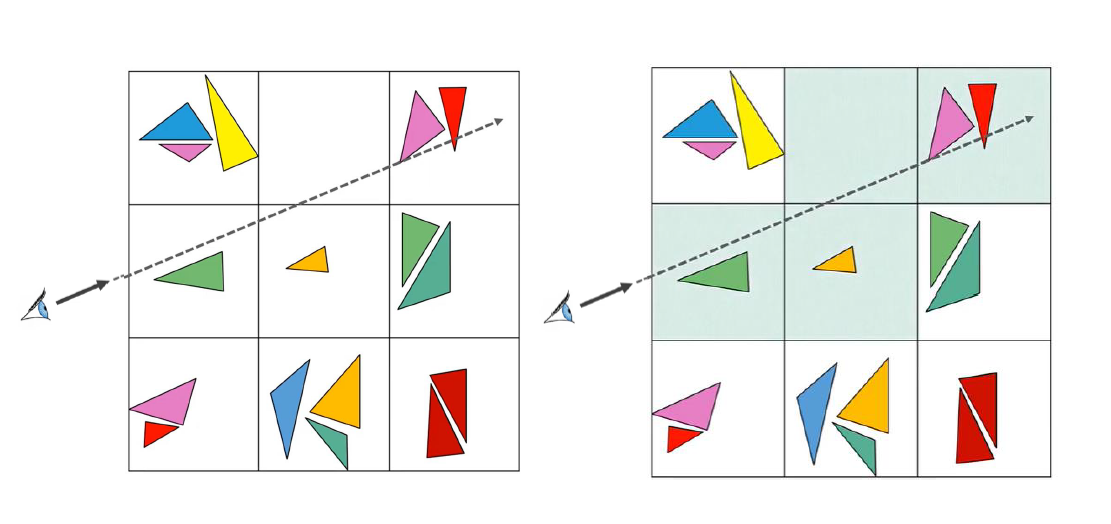
当我们在计算光线与场景的碰撞时,若用传统做法难免需要遍历所有物体,包括一些离得很远,明显不可能碰撞到的物体,这样造成了极大的资源浪费。所以在进行遍历之前我们一般将场景 均匀分割为网格 ,先判断光线与网格的判断,再对碰撞到的网格进行其中的物体碰撞。
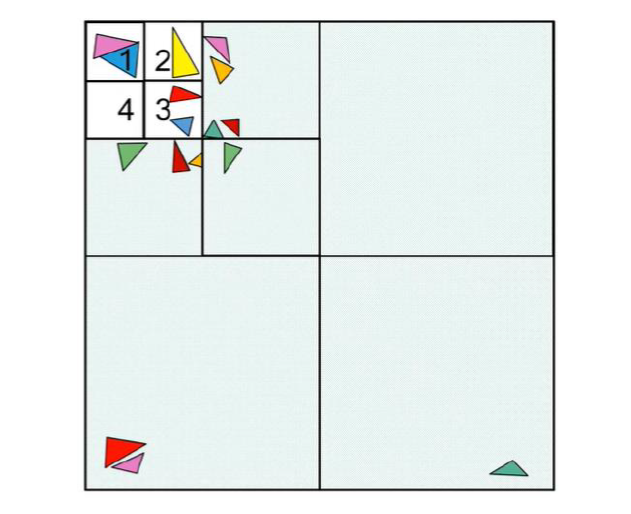
但是,若物体的分布十分不均匀,比如说全部集中在一个网格内,那么我们采用这种方法不但要遍历每个物体,还得额外出遍历每个网格的操作,不但没有加速,反而减速了。于是我们又引入了 八叉树Octree (在二维空间即为四叉树)的做法:将空间平均分为八份,当子空间为空或物体个数较少时便不再细分。这样的分法可以减少无用网格的个数,从而优化遍历速度。
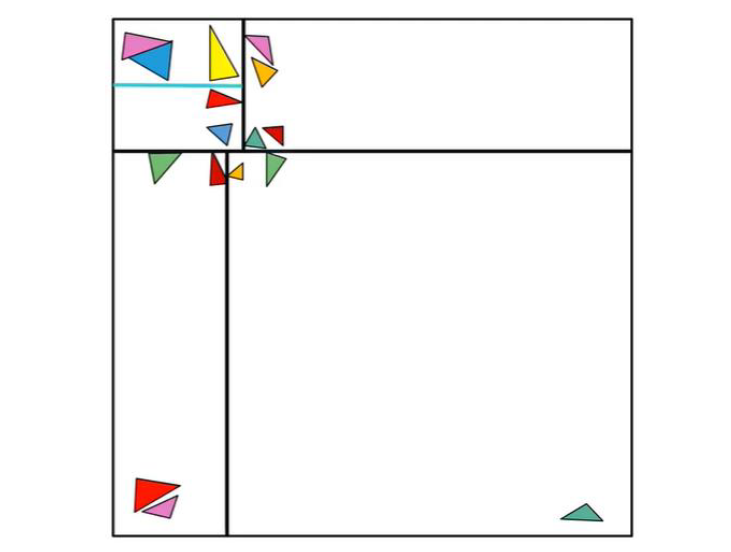
但是,八叉树也存在其局限性:每多一层分割深度,都会指数级地增加网格数,大大影响效率。于是我们又引入了 k-d树 ,k-d树每次以当前空间所有对象的中位数进行剖分,进行更为有效的分割,避免了指数爆炸的情况。
但是不论是使用八叉树或者k-d树,都可能存在一个物体隶属两个网格的情况。所以,我们又又又引入了 BVH(Bounding Volume Hierarchy,层次包围盒)树 ,直观来看就是用一个正方体将物体包围,基本类似于unity或cocos等主流游戏引擎中碰撞检测的碰撞包围盒。先剖分出大的包围盒,再对与光线碰撞的包围盒进行深层剖分。由于该结构允许区间重叠,所以不会出现一个物体隶属两个网格的情况。
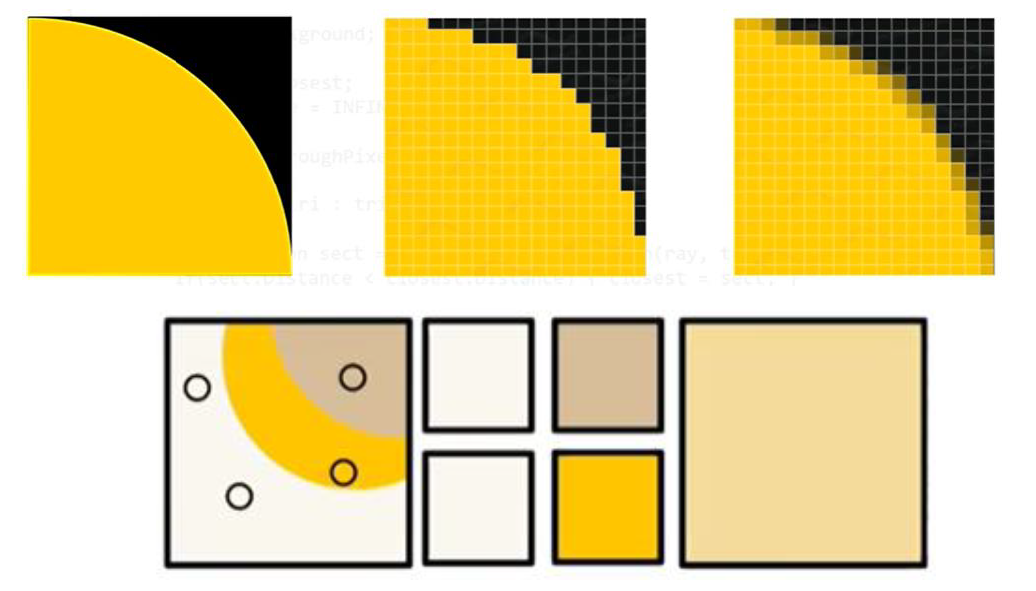
抗锯齿
抗锯齿一般采用随机采样,在锯齿像素部分的周围像素随机取几个采样点,然后对其取平均值来作为当前像素。
进阶
BRDF
Whitted-style的光线追踪还存在许多不足,反映不出完整的全局光照效果,尤其是当物体表面不是镜面或折射面时,只包含局部光照明。
而 BRDF (Bidirectional Reflectance Distribution Function,双向反射分布函数)是一个定义光线在不透明表面反射的四次元函数,用来描述入射光与反射光的关系。
其中 为自发光; 为BRDF,其中l为入射方向,v为出射方向; 为入射辐射率,考虑递归。
但BRDF也存在不足:由于需要进行半球面积分,所以多次折射后会引起指数灾难。